|
Yuliang Guo I'm a Principal Scientist at Maven Robotics, working on general-purpose robotic AI to solve the most challenging industrial tasks. Previously, I was a Lead Scientist at the Bosch Research Silicon Valley, where I led a team focused on 3D vision and physical AI research. |
|
ResearchComputer Vision, Physical AI, Robotics — My research focuses on enabling robotic AI to operate in the physical world that learn new skills through physical experience and generalize across new cameras, embodiments, and scenarios. I pursue this through a few core pillars:
|
News
[2026] |
Publications (show selected / show all by date)(* indicates equal contribution, † indicates corresponding author or project lead) |
|
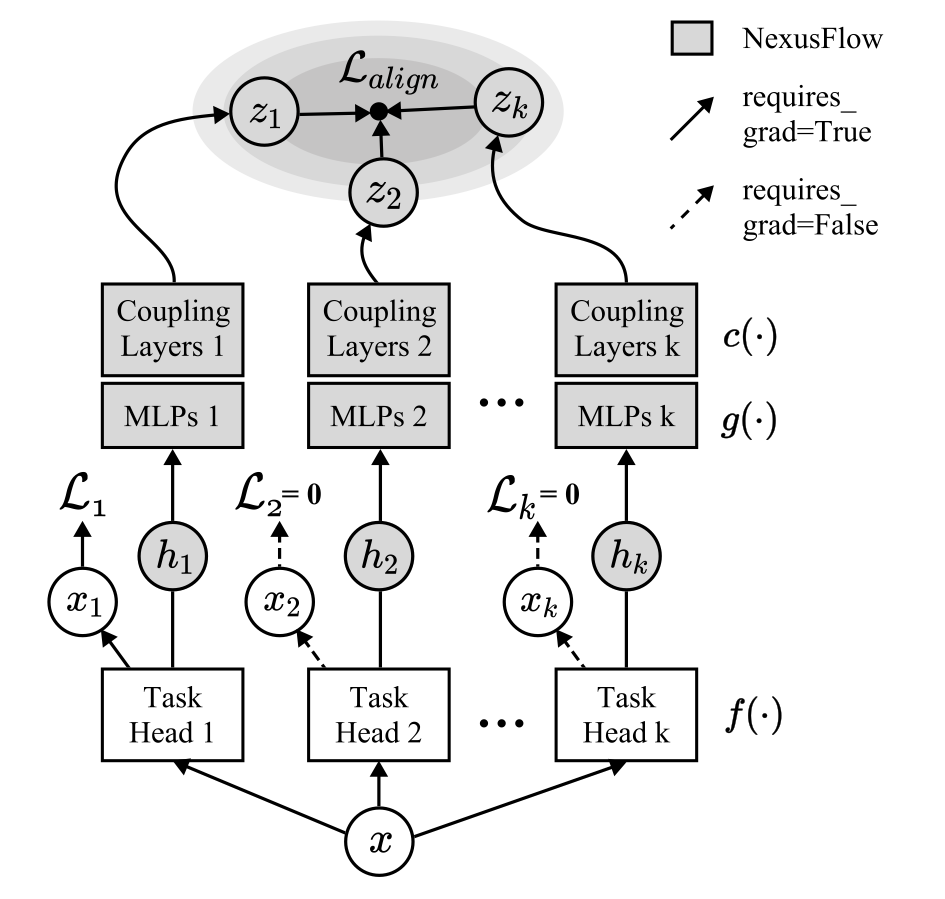
NexusFlow: Unifying Disparate Tasks under Partial Supervision via Invertible Flow Networks
Fangzhou Lin, Yuping Wang, Yuliang Guo†, Zixun Huang, Xinyu Huang, Haichong Zhang, Kazunori Yamada, Zhengzhong Tu, Liu Ren, Ziming Zhang CVPR 2026 [paper] [code] [video] Can we learn across multiple tasks when Task 1 data is collected in region A and Task 2 data in region B? We introduce NexusFlow, a plug-and-play framework based on invertible flow networks that is effective for Partially Supervised Multi-Task Learning (PS-MTL) and the joint learning of diverse dense and sparse prediction tasks. |
|
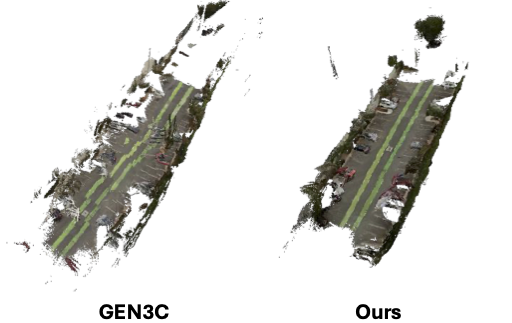
Pantheon360: Taming Digital Twin Generation via 3D-Aware 360° Video Diffusion
Ting-Hsuan Chen, Ying-Huan Chen, Tao Tu, Jie-Ying Lee, Cho-Ying Wu, Fangzhou Lin, Hengyuan Zhang, David Paz, Xinyu Huang, Yuliang Guo†, Yu-Lun Liu, Yue Wang, Liu Ren CVPR 2026 [paper] [project page] [code] [video] Pantheon360 generates controllable 360° videos from sparse panoramic inputs, and user-defined trajectories, with a video diffusion model producing photorealistic outputs. It drastically simplifies digital twin creation while preserving geometric consistency and visual quality. |
|
UniDAC: Universal Metric Depth Estimation for Any Camera
Girish Chandar Ganesan, Yuliang Guo, Liu Ren, Xiaoming Liu CVPR 2026 [paper] [project page] [code] [video] UniDAC is a universal, domain-agnostic metric depth estimation method that generalizes to any camera. UniDAC is trained solely on perspective images yet generalizes effectively to large-FoV inputs, leveraging a universal model to robustly handle both indoor and outdoor environments. |
|
3DGEER: 3D Gaussian Rendering Made Exact and Efficient for Generic Cameras
Zixun Huang, Cho-Ying Wu, Yuliang Guo†, Xinyu Huang, Liu Ren ICLR 2026 [paper] [project page] [code] [video] An efficient volumetric Gaussian rendering method redesigned from first principles. Through exact closed-form Gaussian ray integration, a novel particle bounding design, we eliminate projective approximation error and support large-FoV cameras, preserving both exactness and speed in differentiable rendering. |
|
Online Language Splatting
Saimouli Katragadda, Cho-Ying Wu, Yuliang Guo†, Xinyu Huang, Guoquan Huang, Liu Ren ICCV 2025 [paper] [project page] [code] [video] A fully online system to effectively integrate dense CLIP features with Gaussian Splatting. High-resolution dense CLIP embedding and online compressor learning modules are introduced to serve dense language mapping at realtime (40+ FPS) while retaining open-vocabulary capability for flexible query-based human-machine interaction. |
|
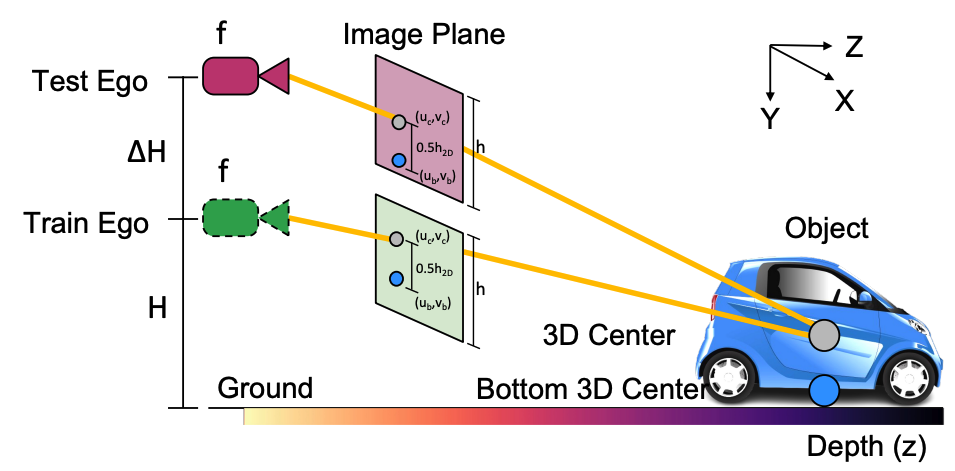
CHARM3R: Towards Unseen Camera Height Robust Monocular 3D Detector
Abhinav Kumar, Yuliang Guo, Zhihao Zhang, Xinyu Huang, Liu Ren, Xiaoming Liu ICCV 2025 [paper] [code] Mathematical derivation of consistent depth error trends under camera height variations in Mono3D models. A method generalizable across different camera heights via averaging ego-regressed and ground-based depth estimates. |
|
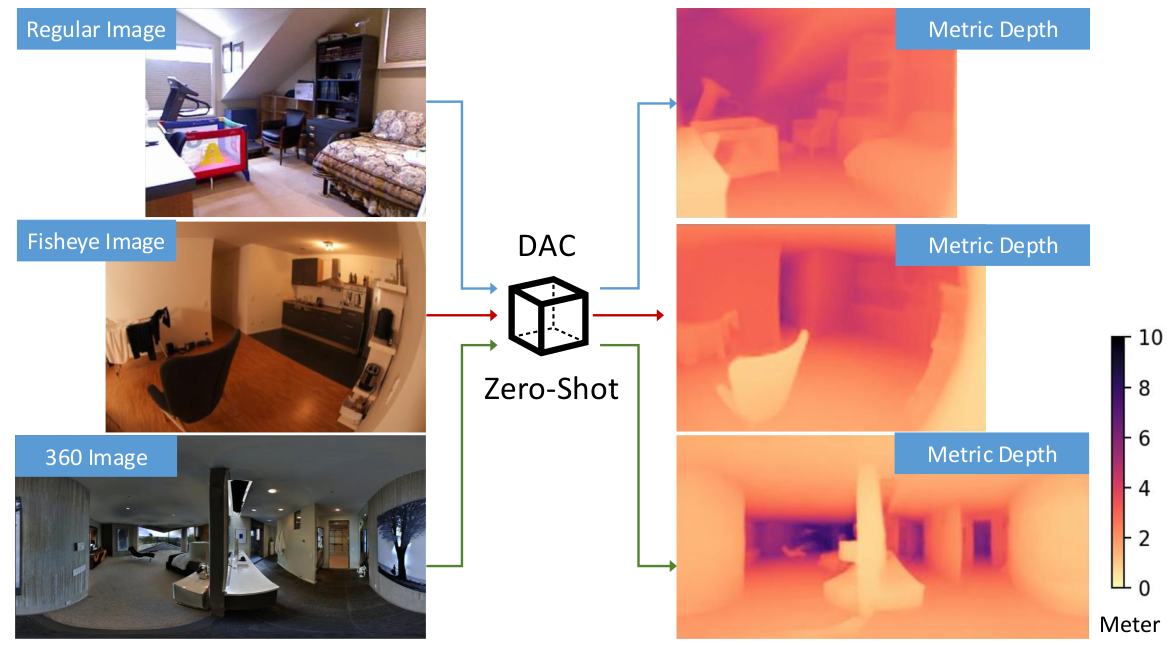
Depth Any Camera: Zero-Shot Metric Depth Estimation from Any Camera
Yuliang Guo†, Sparsh Garg, S. Mahdi H. Miangoleh, Xinyu Huang, Liu Ren CVPR 2025 [paper] [project page] [code] [video] Depth Any Camera (DAC) is a training framework for metric depth estimation that enables zero-shot generalization across cameras with diverse fields of view—including fisheye and 360° images. Tired of collecting new data for every camera setup? DAC maximizes the utility of existing 3D datasets, making them applicable to a wide range of camera types without the need for retraining. |
|
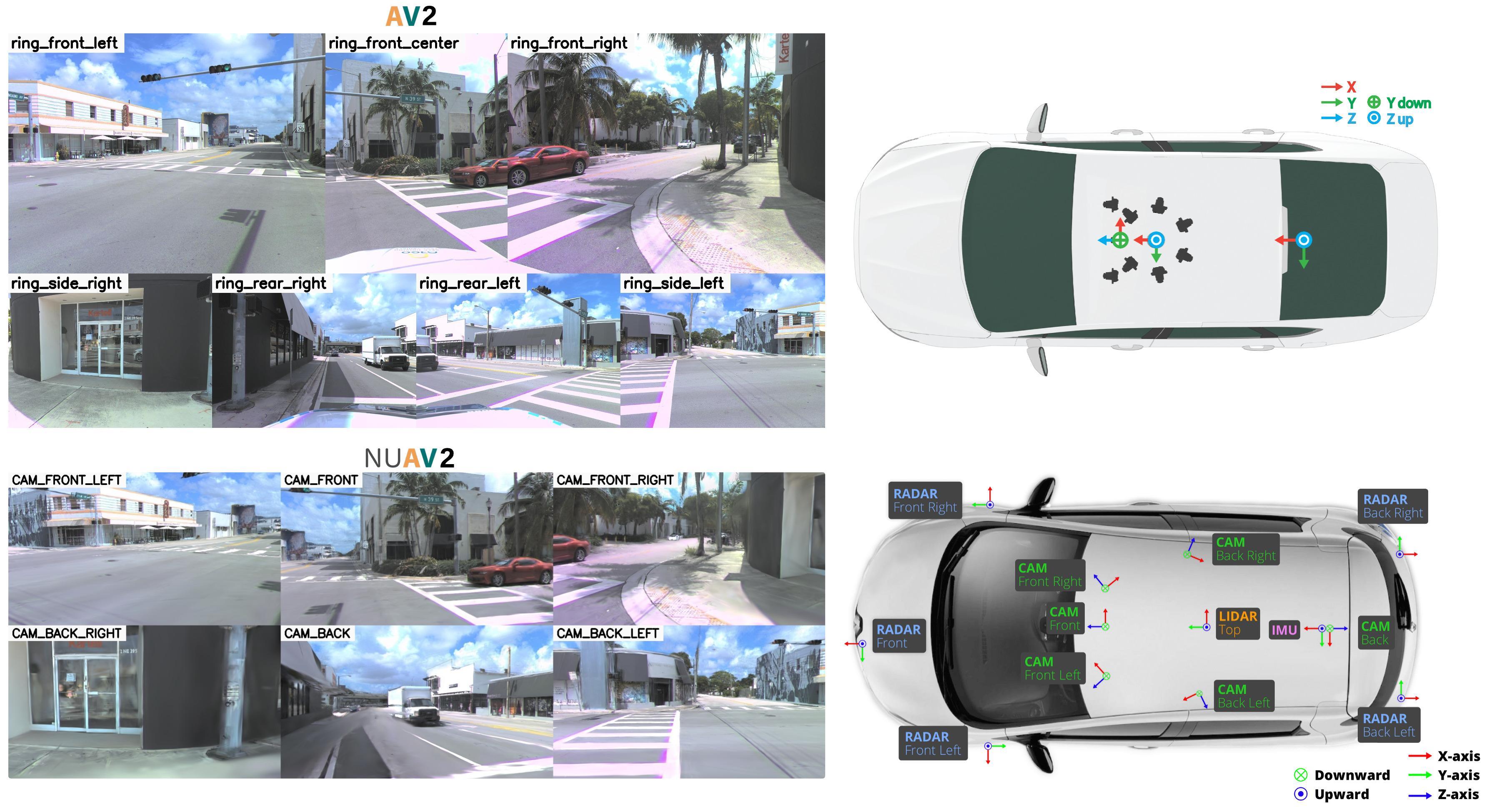
MapGS: Generalizable Pretraining and Data Augmentation for Online Mapping via Novel View Synthesis
Hengyuan Zhang, David Paz, Yuliang Guo, Xinyu Huang, Henrik I. Christensen, Liu Ren IEEE IV 2025 [paper] [project page] Using Argoverse 2 (AV2) sensor configurations, we employ Gaussian splatting to synthesize images in the nuScenes (NUSC) setup. We show that training online mapping algorithms from GS simulation helps cross-dataset generalization. |
|
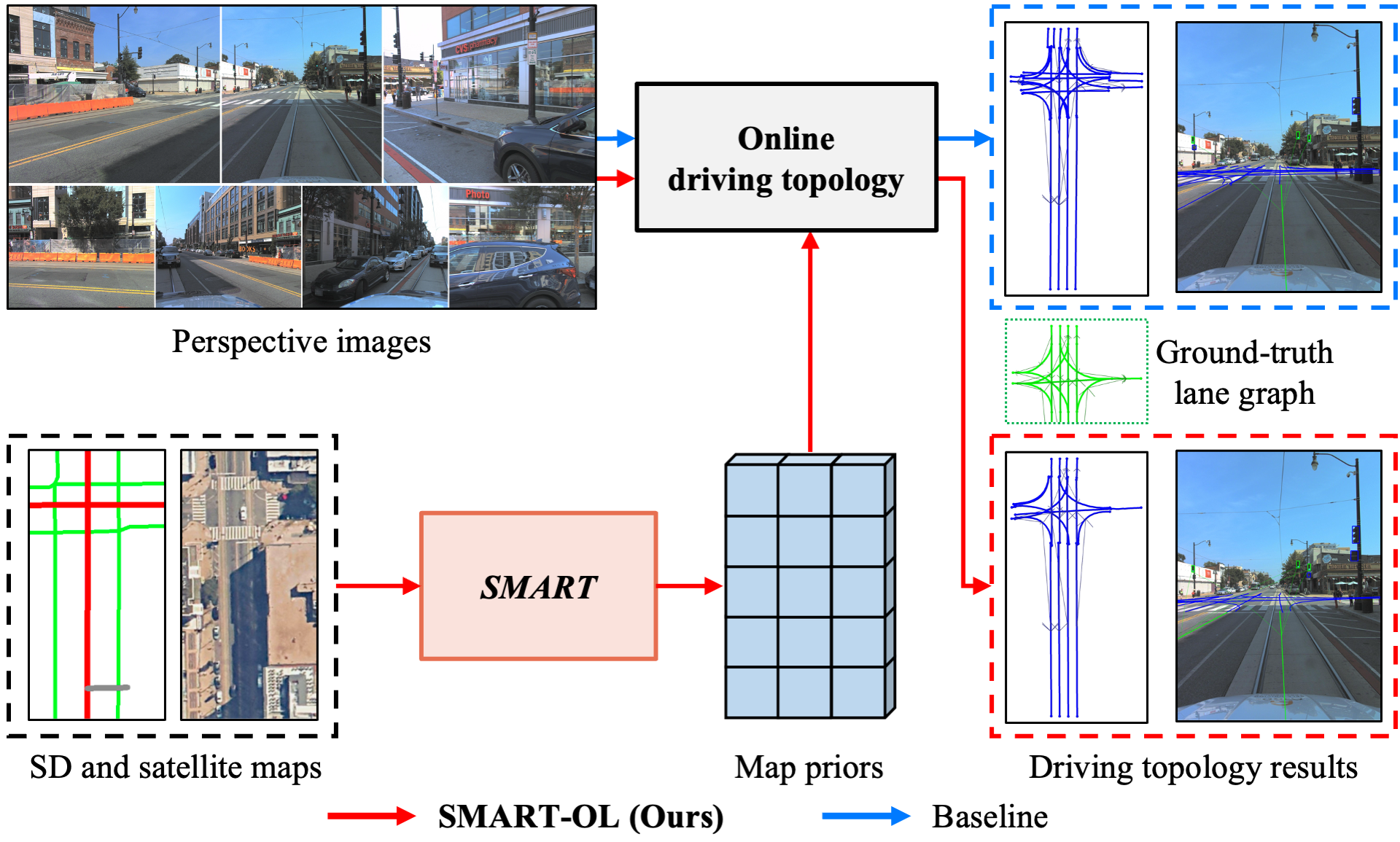
SMART: Advancing Scalable Map Priors for Driving Topology Reasoning
Junjie Ye, David Paz, Hengyuan Zhang, Yuliang Guo, Xinyu Huang, Henrik I. Christensen, Yue Wang, Liu Ren ICRA 2025 [paper] [project page] SMART augments online topology reasoning with robust map priors learned from scalable SD and satellite maps, substantially improving lane perception and topology reasoning. |
|
SUP-NeRF: A Streamlined Unification of Pose Estimation and NeRF for Monocular 3D Object Reconstruction
Yuliang Guo†, Abhinav Kumar, Cheng Zhao, Ruoyu Wang, Xinyu Huang, Liu Ren ECCV 2024 [paper] [project page] [code] [video] A monocular object reconstruction framework effectively integrating object pose estimation and NeRF-based reconstruction. A novel camera-invariant pose estimation module is introduced to resolve depth-scale ambiguity and enhance cross-domain generalization. |
|
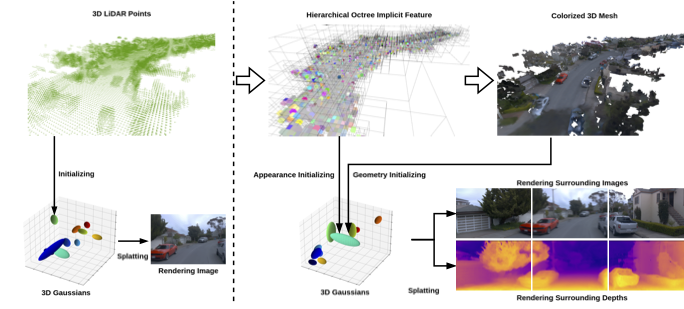
TCLC-GS: Tightly Coupled LiDAR-Camera Gaussian Splatting for Autonomous Driving
Cheng Zhao, Su Sun, Ruoyu Wang, Yuliang Guo, Jun-Jun Wan, Zhou Huang, Xinyu Huang, Yingjie Victor Chen, Liu Ren ECCV 2024 [paper] [video demo] An advanced Gaussian Splatting method effectively fusing Lidar and surrounding camera views for autonomous driving. The method uniquely leverages an intermediate occ-tree feature volume before GS such that GS parameters can be initialized from feature-volume-generated 3D surface more effectively. |
|
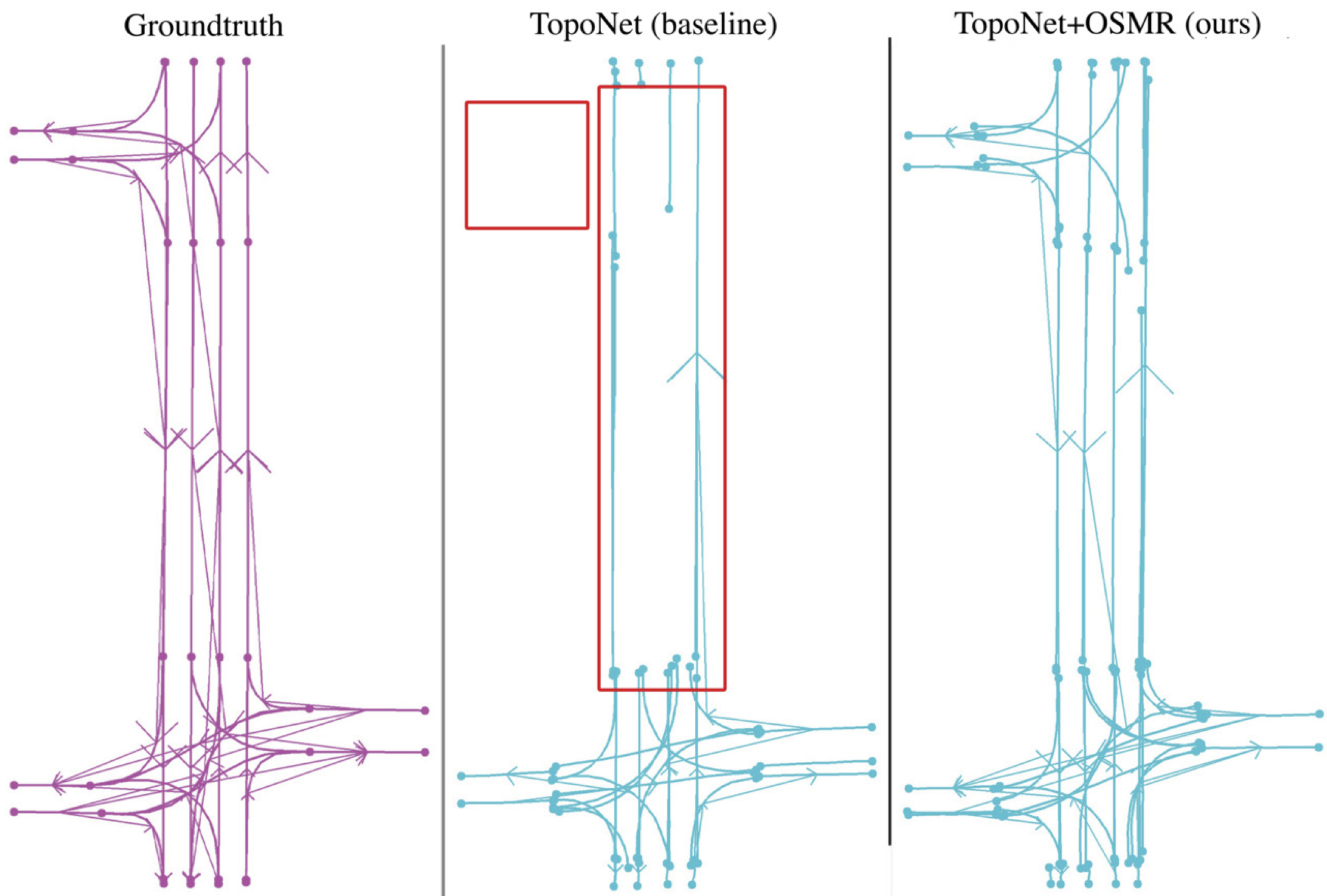
Enhancing Online Road Network Perception and Reasoning with Standard Definition Maps
Hengyuan Zhang, David Paz, Yuliang Guo, Arun Das, Xinyu Huang, Karsten Haug, Henrik I. Christensen, Liu Ren IROS 2024 [paper] [project page] An effective framework leveraging lightweight and scalable priors-Standard Definition (SD) maps in the estimation of online vectorized HD map representations. |
|
SeaBird: Segmentation in Bird’s View with Dice Loss Improves Monocular 3D Detection of Large Objects
Abhinav Kumar, Yuliang Guo, Xinyu Huang, Liu Ren, Xiaoming Liu CVPR 2024 [paper] [code] [project page] A mathematical framework to prove that the dice loss leads to superior noise-robustness and model convergence for large objects compared to regression losses. A flexible monocular 3D detection pipeline integrated with bird-eye view segmentation. |
|
Behind the Veil: Enhanced Indoor 3D Scene Reconstruction with Occluded Surfaces Completion
Su Sun, Cheng Zhao, Yuliang Guo, Ruoyu Wang, Xinyu Huang, Victor(Yingjie) Chen, Liu Ren CVPR 2024 [paper] [project page] A neural reconstruction method enabling the completion the occluded surfaces from large 3D scene reconstrucion. A milestone in automating the creation of interactable digital twins from real world. |
|
3D Copy-Paste: Physically-Plausible Object Insertion for Monocular 3D Detection
Yuhao Ge, Hong-Xing Yu, Cheng Zhao, Yuliang Guo, Xinyu Huang, Liu Ren, Laurent Itti, Jiajun Wu NeurIPS 2023 [paper] [code] [project page] A physically plausible indoor 3D object insertion approach to automatically "copy" virtual objects and "paste" them into real scenes. |
|
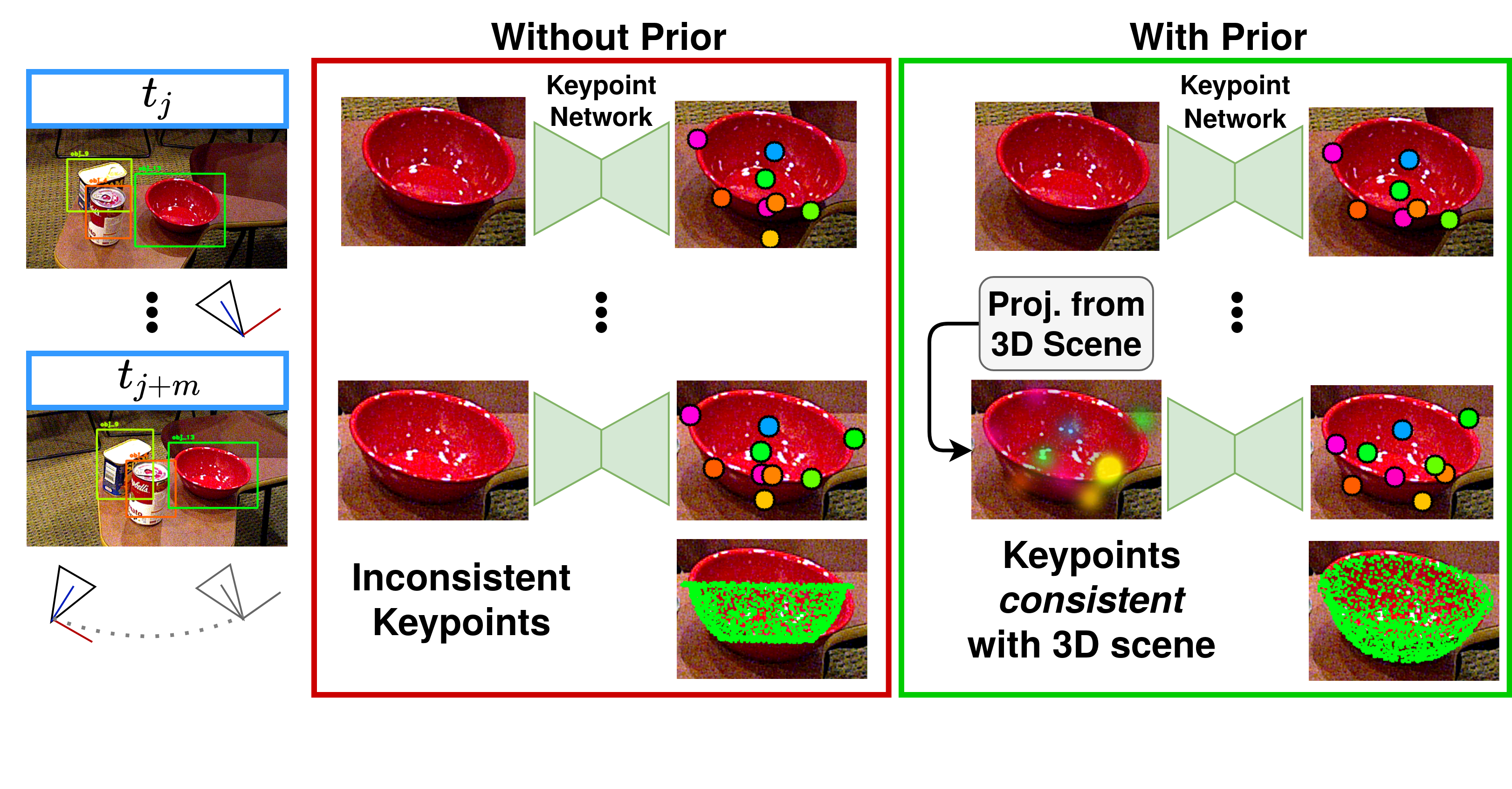
Symmetry and Uncertainty-Aware Object SLAM for 6DoF Object Pose Estimation
Nathaniel Merrill, Yuliang Guo, Xingxing Zuo, Xinyu Huang, Stefan Leutenegger, Xi Peng, Liu Ren, Guoquan Huang CVPR 2022 [paper] [code] A keypoint-based object-level SLAM framework that can provide globally consistent 6DoF pose estimates for symmetric and asymmetric objects. |
|
OmniFusion: 360 Monocular Depth Estimation via Geometry-Aware Fusion
Yuyan Li*, Yuliang Guo*, Zhixin Yan, Xinyu Huang, Ye Duan, Liu Ren CVPR 2022 (Oral Presentation) [paper] [code] The first vision transformer approach to handle 360 monocular depth estimation with spherical distortion. Novel designs include tangent-image coordinate embedding and geometry-aware feature fusion. |
|
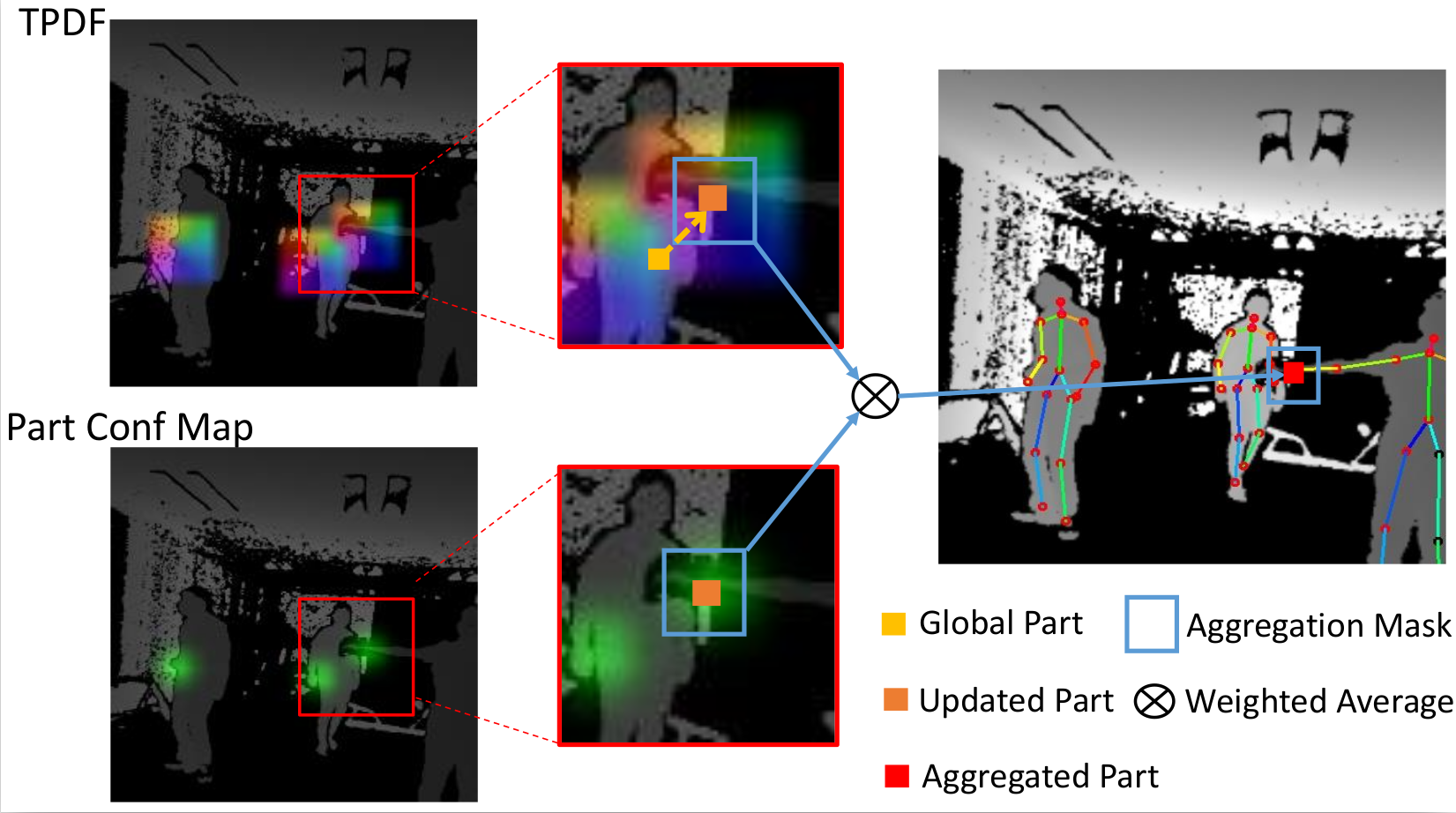
PoP-Net: Pose over Parts Network for Multi-Person 3D Pose Estimation from a Depth Image
Yuliang Guo, Zhong Li, Zekun Li, Xiangyu Du, Shuxue Quan, Yi Xu, WACV 2022 [paper] [code] [dataset] A real-time method to predict multi-person 3D poses from a depth image. Introduce new part-level representation to enables an explicit fusion process of bottom-up part detection and global pose detection. A new 3D human posture dataset with challenging multi-person occlusion. |
|
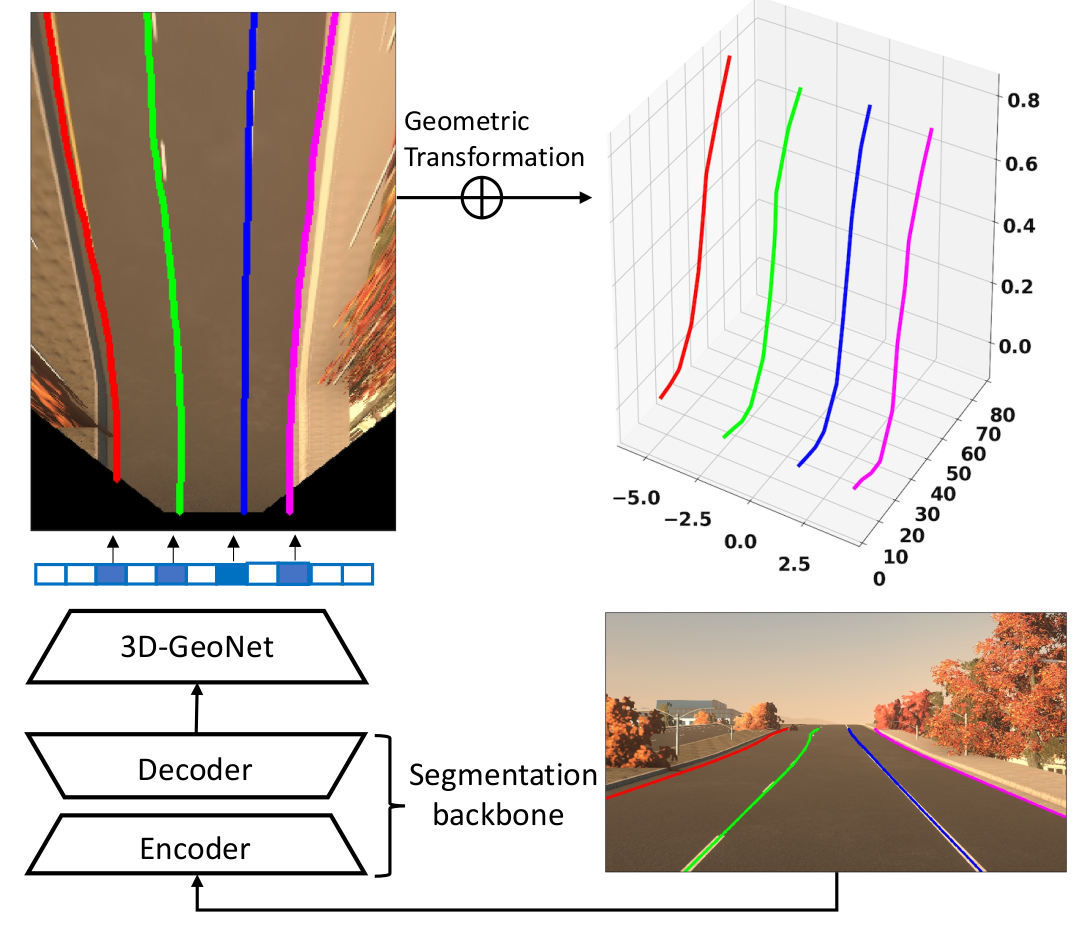
Gen-LaneNet: A Generalized and Scalable Approach for 3D Lane Detection
Yuliang Guo, Guang Chen, Peitao Zhao, Weide Zhang, Jinghao Miao, Jingao Wang, Tae Eun Choe ECCV 2020 [paper] [code] [dataset] A pioneer work in predicting 3D lanes from a single image with high generalization to novel scenes. A 3D lane synthetic dataset is introduced. |
|
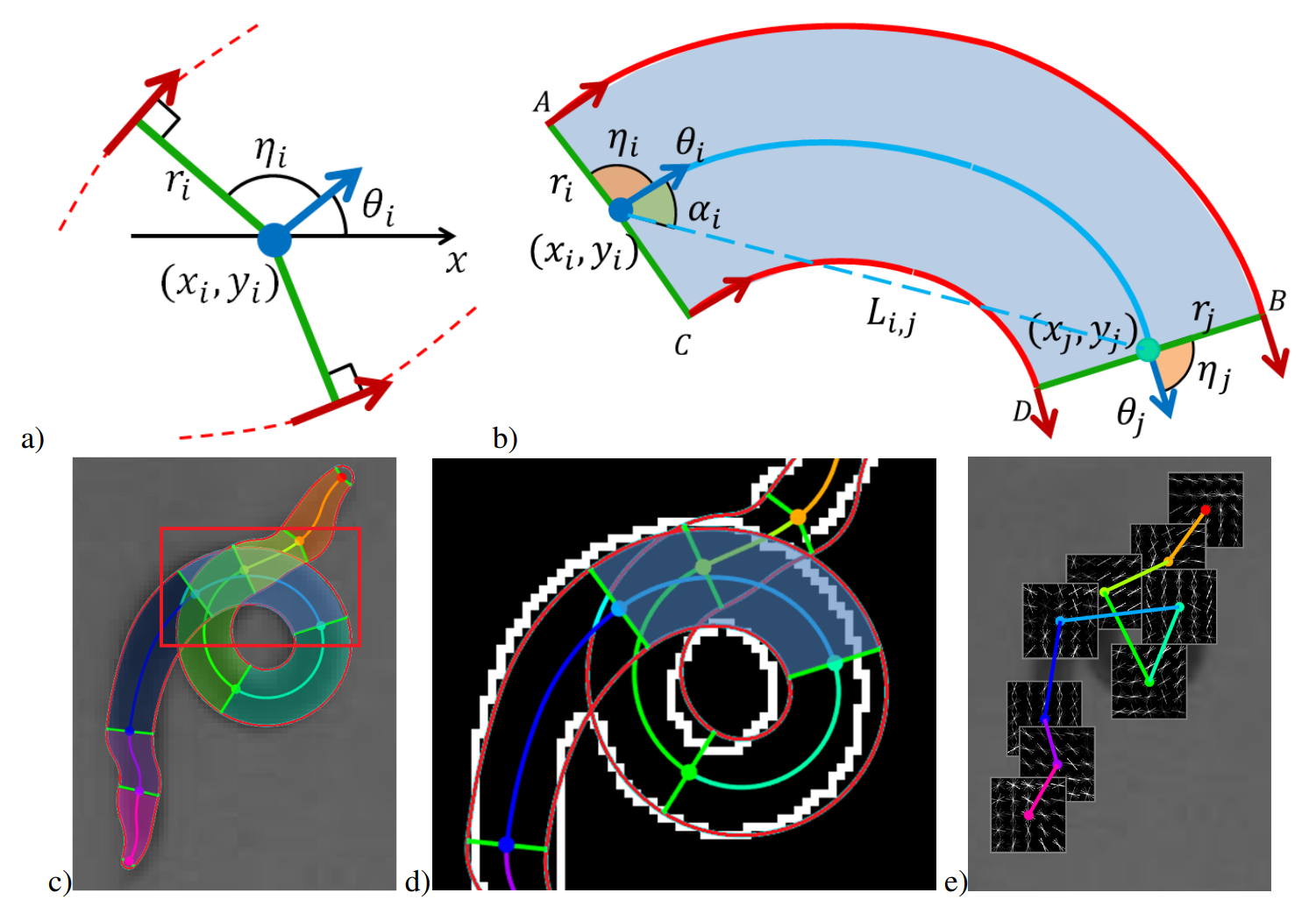
Differential Geometry in Edge Detection: Accurate Estimation of Position, Orientation and Curvature
Benjamin B. Kimia, Xiaoyan Li, Yuliang Guo, Amir Tamrakar TPAMI 2018 [paper] [code] [dataset] Numerically robust image filters and symbolic curve models are introduced to precisely estimate differential geometry attributes associated with image edges, including localization, orientation, curvature, edge topology. |
|
Robust Pose Tracking with a Joint Model of Appearance and Shape
Yuliang Guo, Lakshmi N. Govindarajan, Benjamin B. Kimia, Thomas Serre arXiv 2018 [paper] A joint model of learned part-based appearance and parametric shape representation to precisely estimate the highly articulated poses of multiple laboratory animals. |

|
BoMW: Bag of manifold words for one-shot learning gesture recognition from kinect
Lei Zhang, Shengping Zhang, Feng Jiang, Yuankai Qi, Jun Zhang, Yuliang Guo, Huiyu Zhou IEEE Transactions on Circuits and Systems for Video Technology 2017 [Paper] One-shot learning gesture recognition on RGB-D data recorded from Microsoft Kinect. A novel bag of manifold words (BoMW) based feature representation on sysmetric positive definite (SPD) manifolds. |
|
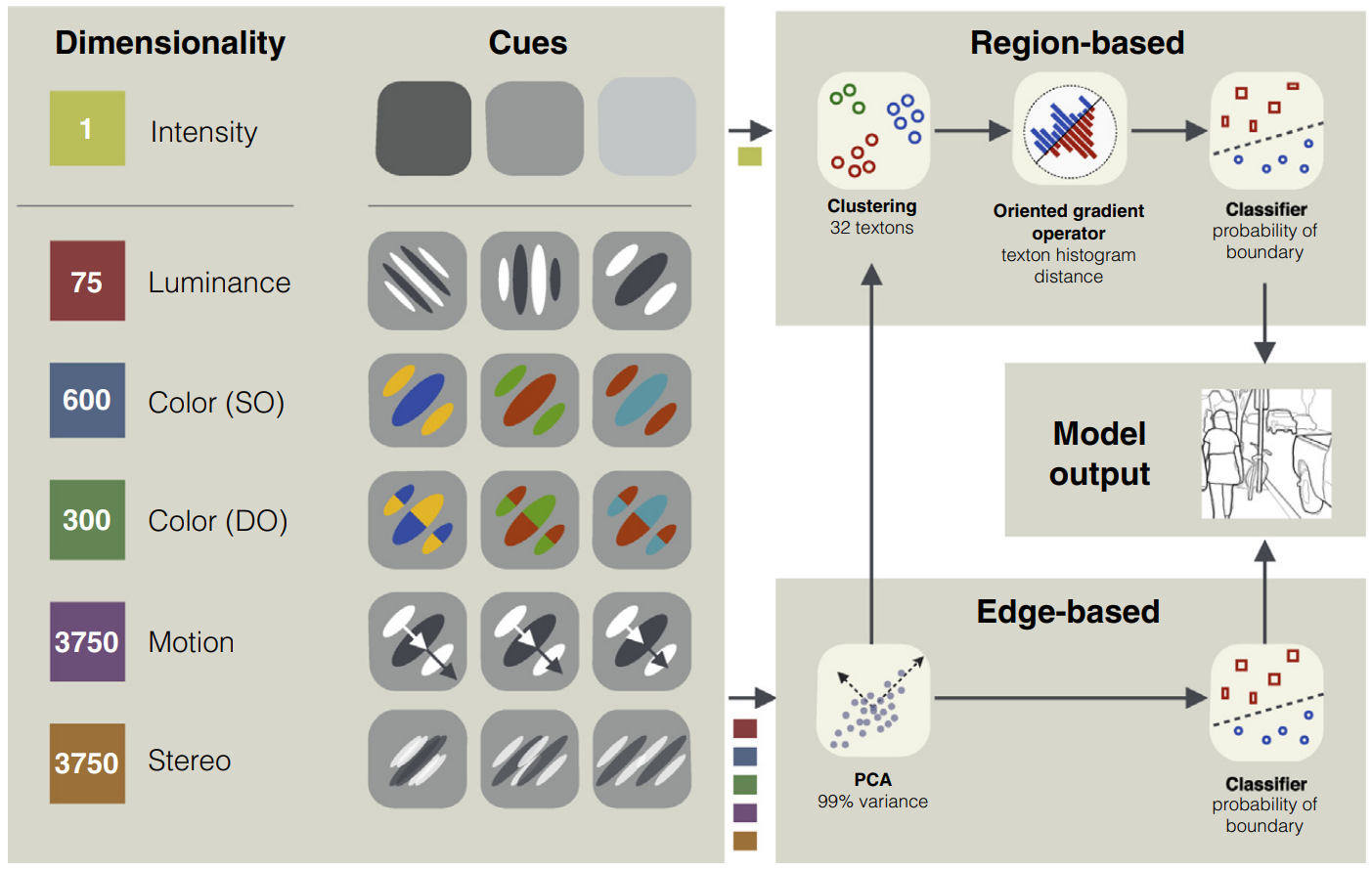
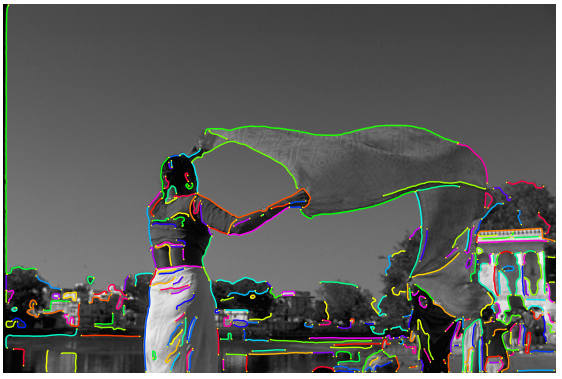
A Systematic Comparison between Visual Cues for Boundary Detection
David A. Mely, Junkyung Kim, Mason McGill, Yuliang Guo, Thomas Serre Vision Research 2016 [paper] [dataset] This study investigates the relative diagnosticity and the optimal combination of multiple cues (we consider luminance, color, motion and binocular disparity) for boundary detection in natural scenes. A multi-cue boundary dataset is introduced to facilitate the study. |
|
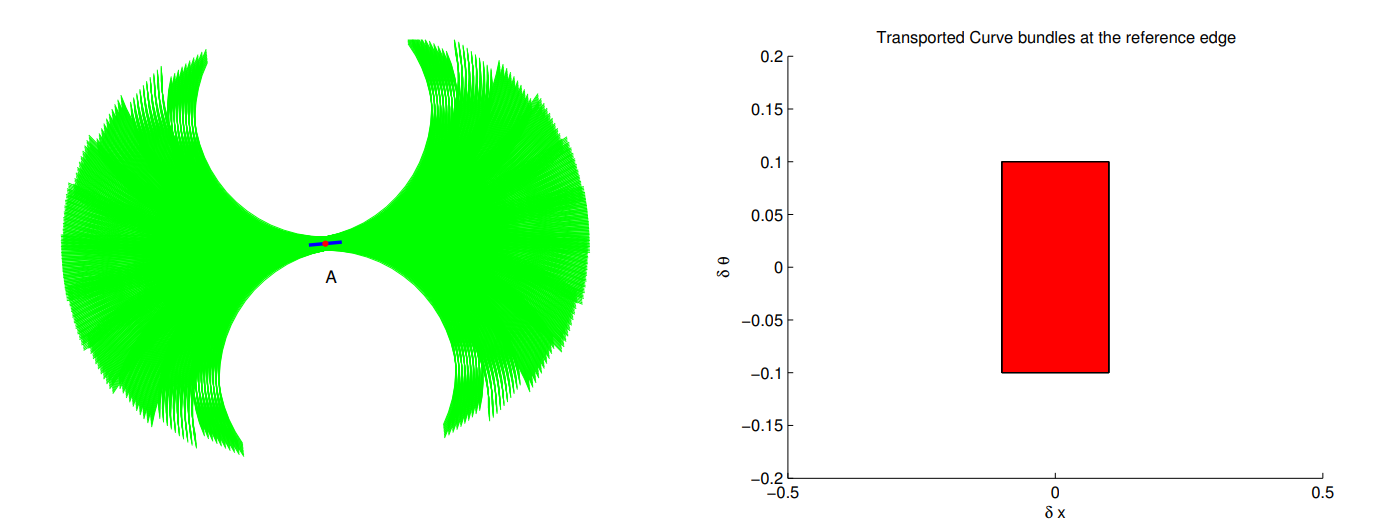
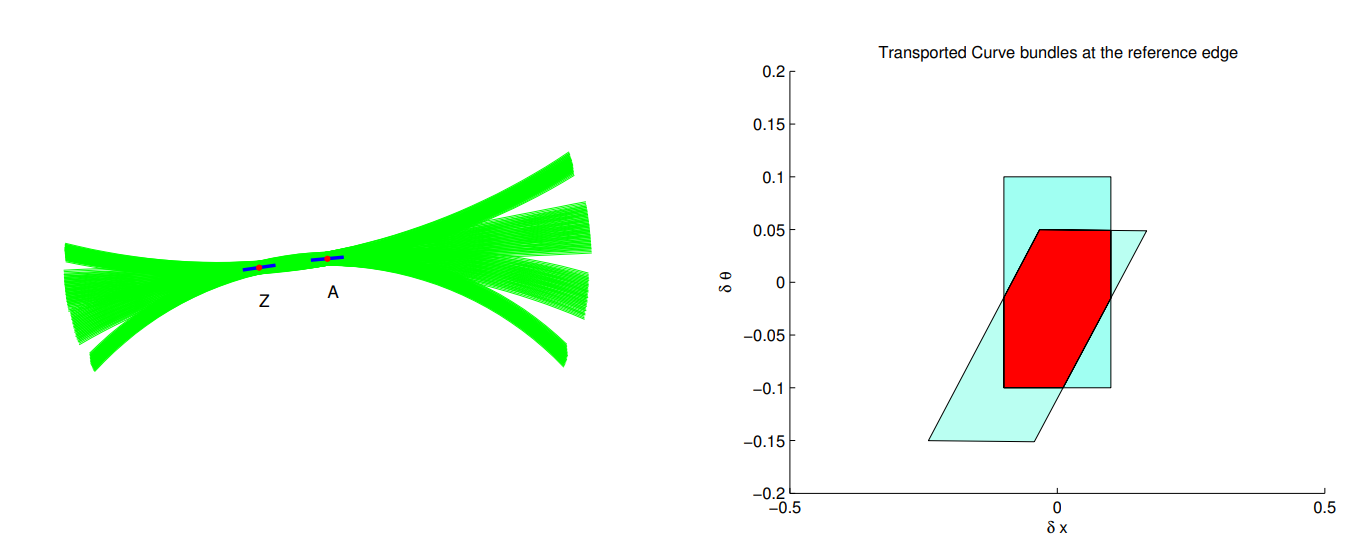
A Multi-Stage Approach to Curve Extraction
Yuliang Guo, Naman Kumar, Maruthi Narayanan, Benjamin B Kimia ECCV 2014 [paper] [code] A multi-stage approach to curve extraction where the curve fragment search space is iteratively reduced by removing unlikely candidates using geometric constrains, but without affecting recall, to a point where the application of an objective functional becomes appropriate. |
Industrial Impact
|
Selected Patents
|